Drone Harmony Mobile automatically executes flight missions planned within Drone Harmony. Here we list the main safety features, dos and don’ts for flying with Drone Harmony Mobile.
We recommend reading this short post about the the flight execution workflow before starting to execute flight missions.
Emergency Stop
The safest and fastest way to stop automated flight execution is by toggling the mode switch on the DJI Remote Controller from “P” to “S”. By doing so the automated flight execution is immediately interrupted and the drone will hover in place. We recommend switching back to “P” mode before starting flying the drone manually, as the “S” mode typically exhibits more aggressive flight characteristics. Note that by switching back the “P” the execution of the automated flight will not continue.
Return to Home (RTH)
DJI RTH function works with Drone Harmony. You can initiate RTH at any time during manual or automatic flight by pressing on the RTH button on the remote. In addition when launching a mission DH shows the currently stored RTH altitude on the drone and also allows you to set a new RTH altitude. When launching an automatic mission from the ground DH sets the home location as the launch location. This will be the location where the drone will return in case of RTH. Home location is indicated on the map with a special icon. Note that if a DJI drone is close to home location (several meters away) – it will immediately land in case RTH is initiated (instead of the usual procedure when the drone flies up, reaches the RTH altitude and then flies home in a straight line and lands).
Obstacle Avoidance in Planning
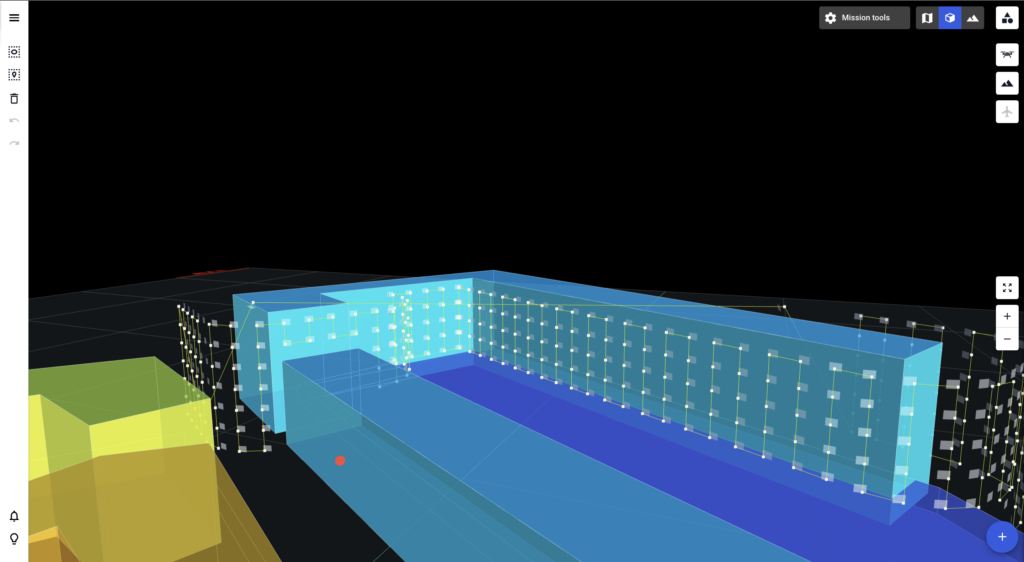
Drone Harmony’s unique workflow lets you input shapes to represent structures, no fly zones and other obstacles. The vast majority of Drone Harmony flight plans that automatically generated will avoid all objects that we added to the scene before plan generation. If, however, you make changes in the scene after the plan was generated, the flights might no longer respect the new obstacles.
In any case, we always recommend to inspect the flight plan in 3D or 3D DEM views before its automated execution, to guarantee that it reflects your desired behavior and that all current obstacles in the scene are avoided.
Obstacle Avoidance Sensors
In addition to obstacles avoidance in planning, your drone may be equipped with obstacle avoidance sensors that prevent the drone from crashing into obstacles during flight. Drone Harmony does not activate, or deactivate these sensors, hence, unless you deactivate them yourself in the native app (e.g. DJI Go 4), these sensors will remain active.
Pausing & Resuming Missions
In cases where the flight execution needs to be halted, but there is not immediate risk imposed by the current flight trajectory, it is possible to pause the mission. The advantage of pausing versus stopping by toggling the mode switch, is that paused missions can be immediately continued from where they were paused. It is also possible edit the flown missions before resuming it.
Setting End of Mission and Signal Loss Actions
It is possible to determine the behavior of Drone Harmony Mobile in various important scenarios, including in the end of the mission, and in case the radio signal is lost. We recommend to be aware of these setting and use them in accordance to the flight environment.
The end of mission behavior can be set in the launch dialogue to be one of the following options:
- Return to Home: The drone will land automatically at the last waypoint
- Hover: The drone will remain hovering at the last waypoint. At this point the drone can be controlled bu the remote controller.
In some situations, the signal between the remote controller and the drone can be temporarily lost (for example, in case of long distance flights, flight around large obstructions, flight near RF emitting devices etc.). It is hence important to determine and set the desired action in case of signal loss, especially when inspecting larger assets, or flying longer missions. In Drone Harmony Mobile you can choose among the following options. These setting is available in the launch dialogue.
- Continue Mission: The drone will continue its planned mission until completion.
- Abort Mission: The mission will be aborted and the drone will hover in place.
We generally recommend to use the Continue Mission option, as it reduces the risk that the drone remains in a zone with no radio reception.
Displaying Airspace Safety Information in Drone Harmony Web
Drone Harmony Web is integrated with Altitude Angel’s Aispace Safety database. This allows customers to view Airspace restrictions and zones directly in Drone Harmony Web.
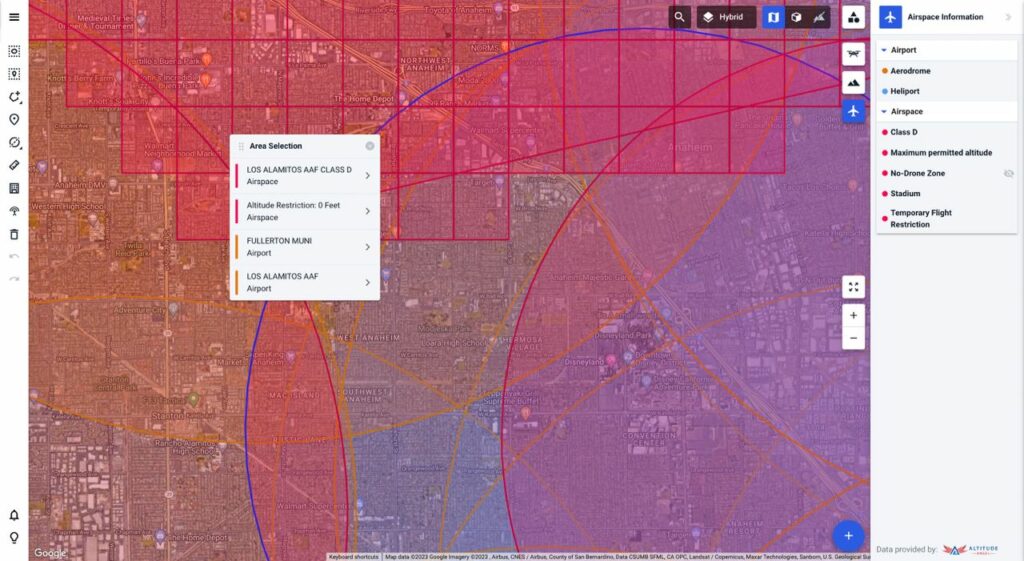
To toggle the Airspace view, click on the airspace toolbar icon on the top-right part of the screen. The airspace information will immediately start to display in the form of overlays in map view. For more information, read this article.


